
I have found through idle conversation that there seems to be a lot of confusion surrounding the labelling of types of drive systems. Contrary to what some people will tell you, there are four types of drive systems in use on electric skateboards today, not three. The two that are conflated more often then not are hub drive systems and direct drive systems, which are actually completely different in spite of whatever creative semantics you may employ to explain how alike they are. In this article we will be discussing the various differences, advantages, and disadvantages of not only those two types of drive systems but also belt drives and gear drives. Hopefully after reading this you will be smart enough to run back to the forums and tell everyone how wrong they are, because that’s what makes the internet great.
Belt Drives
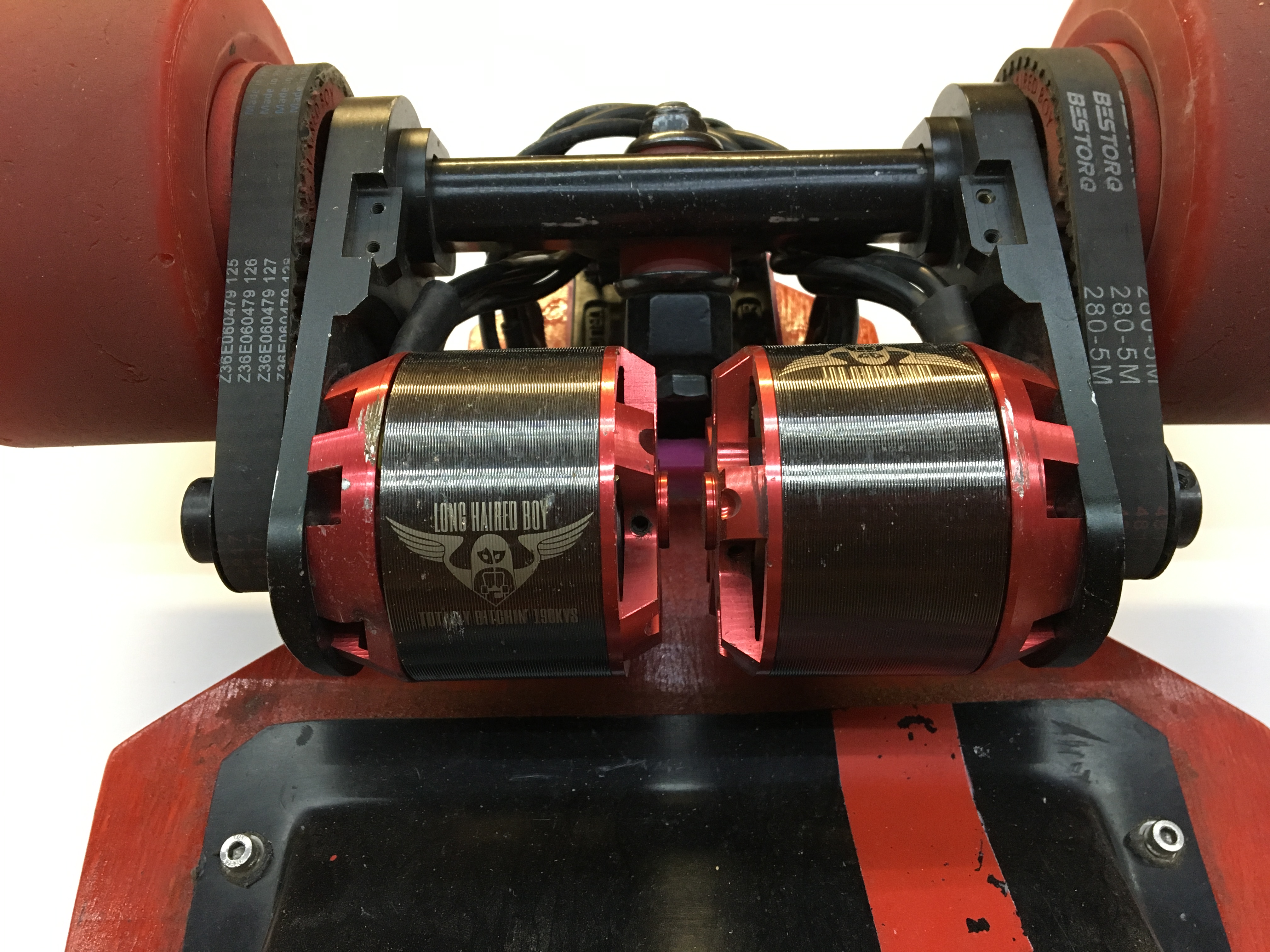
Belt drives are among the most common type of drive system. This system is comprised of a motor that is mounted to a bracket, aka motor mount, that is then mounted to the truck hanger in some clever way. The motor has a pulley on it, the wheel has a pulley mounted to it as well, and a belt connect the two. They’re pretty easy to spot because they have motors hanging off the trucks and you can usually see the portion of the belt next to the wheel. The more refined commercial belt driven boards have special covers for the belts and pulleys that help prevent the most obvious threat from taking hold: debris in the belt and pulley teeth. Boosted Boards has one of the most enclosed belt drive systems I’ve seen, and somehow they’re even able to run HTD-3M belts, whereas almost everyone else, including the DIY community, has adopted HTD-5M as the standard. Evolve on the other hand runs their belts almost completely wide open save a small cover over the motor pulley, and uses 5M belts. Evolve runs their motors outboard, meaning they aren’t under the deck like the ones pictured above. This is often thought to explain why they don’t really need to enclose the entire system to protect it from rocks and debris. Most DIYers don’t even bother with belt covers, myself included. A dental pick and a skate tool make short work of any minor debris that gets caught in the pulley or belt teeth, and it often makes routine field maintenance easier just not having them in the way. A field belt swap or pulley cleaning often takes less than five minutes.
Benefits
The biggest benefit of belt drive systems is the ability to change gearing, as well as use whatever wheels you want (or can find pulleys for). A secondary to that, and a side effect of even having a reduction gear or pulley system, is that you are running faster motors, which is more desirable for not only gaining the best compromise between start up torque and top end speed, but also for keeping the motors cool and happy by placing them closer to their efficiency zones. Motors are usually happier when spinning faster, as they lose a lot of energy to damaging heat when first getting started or maintaining very low speeds under load. Being able to use whatever wheels you want is no trivial point, either. This drive system allows you the use of the ‘thane of your choice which matters a lot to most people. Lastly, maintenance is typically very simple and can be done in the field with minimal tools.
Drawbacks
If the belt system is open, it is susceptible to debris that can find its way into the belt and pulley teeth and cause minor issues. These issues can be resolved quickly and easily, however, simply by removing the debris, and usually with no lasting damage. Belts do need to be replaced on occasion, so there is some built in maintenance to this type of drive. Belts can also be susceptible to slicing by road debris such as bits of metal or glass, which is rare, but it does happen.
Hub Drives
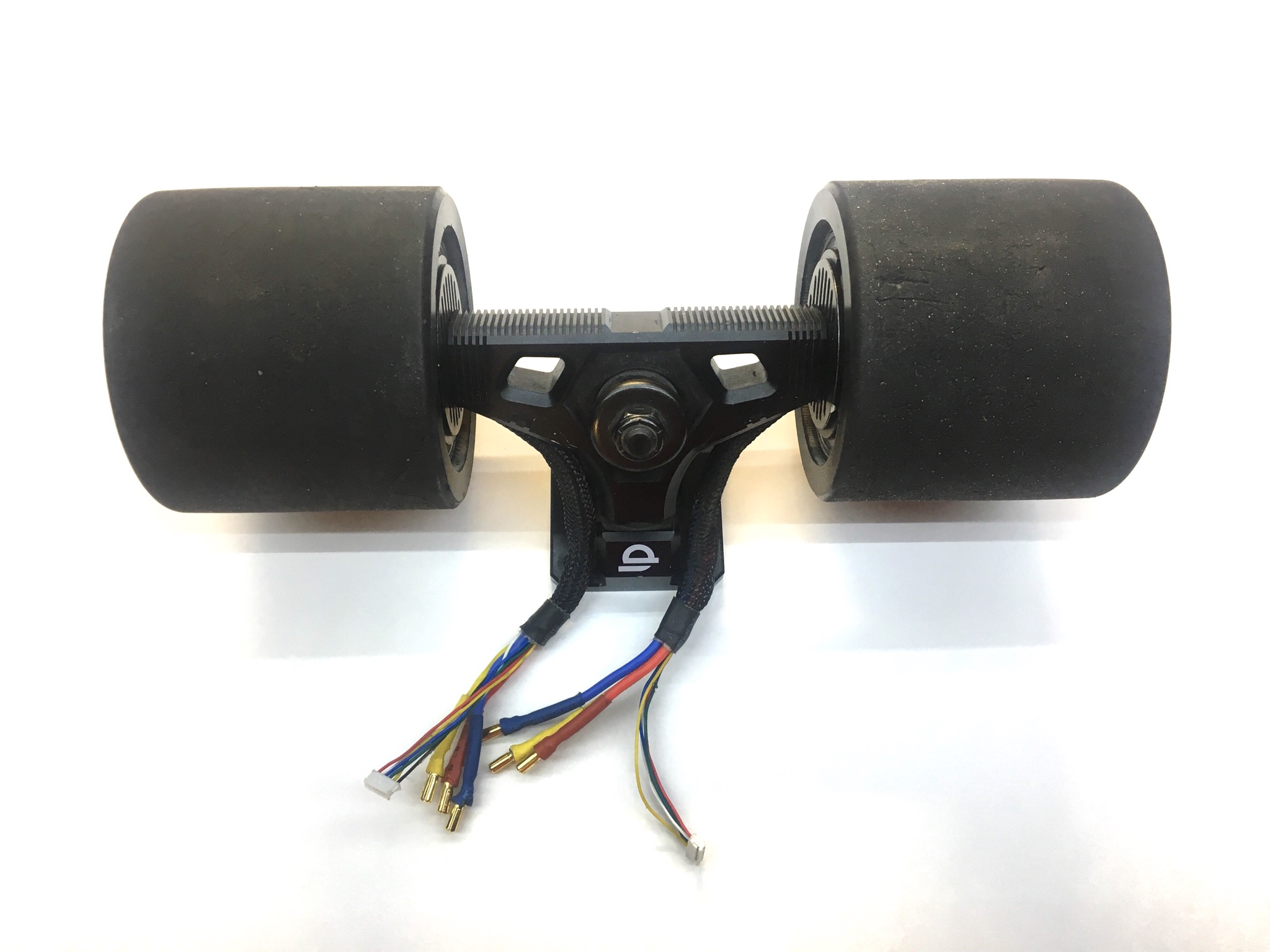
Hub drives are characterized by the motor being inside the wheel, and are basically the opposite of belt drives in many ways. Instead of running a reduction gearing and faster motor, you are running no reduction at all and a much, much slower motor with far more low end torque than top end speed. In this configuration the motor is at a greater mechanical disadvantage because you have now placed it inside the wheel, removing the leverage it would have had in reduction. This is why the motors in hub drives are often run at higher voltages and have a much, much lower KV rating. This is also the reason that hub drives can be used to build potentially faster boards than belt drives can when restricted to off the shelf DIY parts.
Benefits
Well built hub drives are almost no maintenance. No motor mounts to bang up or shift out of alignment, no belts or wheel pulleys to break, and no belt tension or alignment to keep tabs on. They can’t get rocks in them, they’re much easier to install than a belt system, and potentially they can be used to build faster more reliable boards due to the speed advantages of having the urethane tire on the outside of the motor, and they don’t really have any sort of maintenance that is required other than replacing the tire sleeves on models that allow it.
Drawbacks
There is a big advantage to real ‘thane wheels and you’ll know it as soon as you ride on hubs. Motors are very hard, and when they have to support your weight and abuse directly, they have to be even harder. And to get you up to any reasonable speed, they have to be big and powerful. So now that you’ve replaced most of your cushy urethane with steel and copper, you’re going to be in for a very stiff ride. The urethane on most hubs is depressingly thin, with as little as 12mm thickness on some types. Rocks, glass, and metal debris will destroy your thin thane sleeves much quicker than regular wheels. Heat is also an issue because it doesn’t really have anywhere to go under all of that thane in most models. And as we said earlier, motors get hot and bothered when they have to put out a lot of low end power up hills and during startup. Often this heat just builds up until parts start to fail, and good luck getting parts for your hub drive. Lastly you have say over neither wheel choice nor KV on most hub systems, so good luck tuning your ride to your style.
Direct Drive
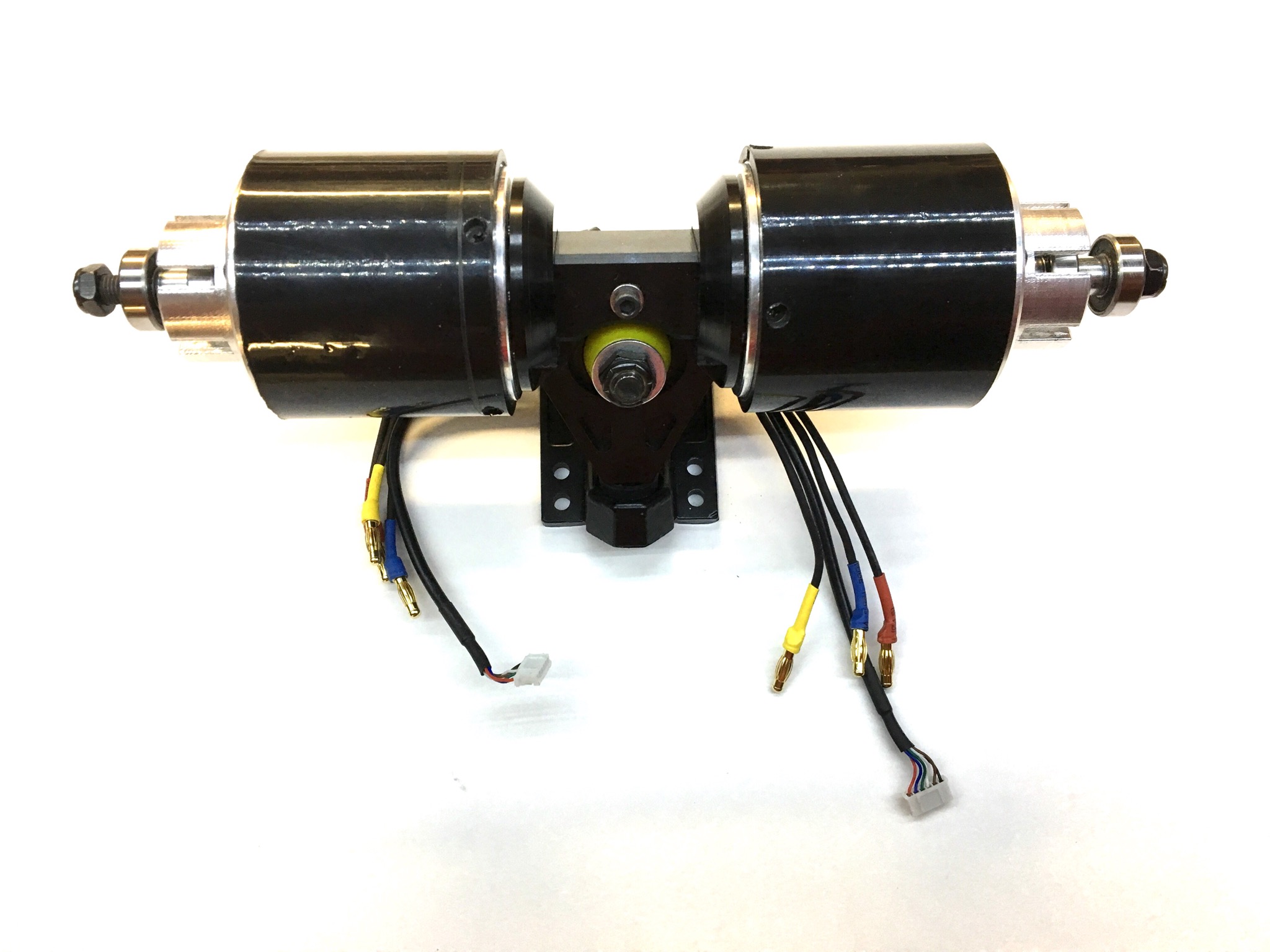
This is a relatively new type of drive system in which the motors sit directly next to (as in just outside of) the wheel on the truck hanger. This is often accomplished by sleeving the motor can in heavier armor than usual, creating a large keyed channel through the center of the motor, keying the truck hanger to match, then sliding the whole motor onto the hanger. They will usually be heavy, and have much heavier axles than normal to prevent bending under load and also to provide a metallic mass for heat dissipation. You may even find heat sink fins on the hanger of some models. Direct drives seem to benefit from advantages of both belt systems and hub systems, while minimizing the disadvantages from either. Most notably, direct drives allow the use of full ‘thane wheels.
Benefits
The clearest benefits to direct drive systems seem obvious as soon as you look at them. The motor is exposed for far better heat dissipation, and you can bring your own wheels. They also share the low to no maintenance benefits of hub drives, but without any of the caveats of that system. No belts to break, no pulleys to align, no urethane blocking the heat from escaping, and no lock-in on wheel size make them very, very attractive.
Drawbacks
The motors are hanging just outside the wheels directly on the hanger. while that’s an advantage over hubs for heat dissipation, its a disadvantage when it comes to accruing damage over time. If the armor isn’t up to snuff on the motor cans, hitting a rock in the road while traveling at speed could easily shatter a magnet. On some setups, there’s less than 15mm of clearance between the motor and the road on a given direct drive build. That’s low enough to crack street reflectors and hit a size-class of rocks that normally wouldn’t present any issue at all.
Gear Drives
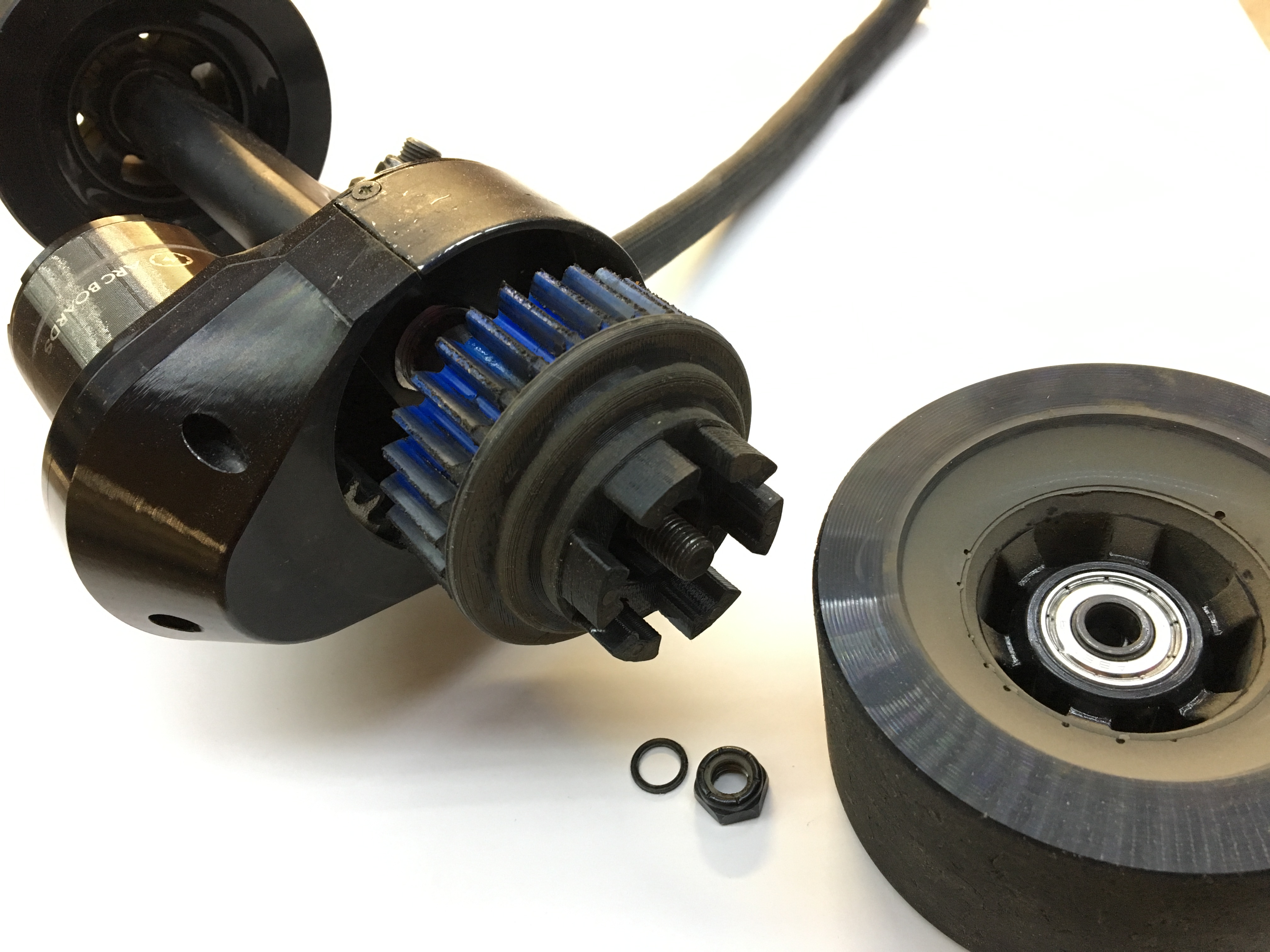
Gear drives are also relatively new to commercial electric skateboards, but not all that new to the DIY scene. As you can see in the image above, gear drives are just that: drives that have gears instead of belts for power transmission. From a distance they can appear similar to an enclosed belt drive, but upon further inspection the motor is too close to the hanger for that. Putting a higher speed motor in a reduction like this allows for better efficiency, better heat dissipation and better low end torque than hubs and direct drives, but doesn’t have many of the other advantages (or disadvantages) of belts.
Benefits
Gear drives are lower maintenance than belt drive systems while still giving you the advantages of a reduction ratio and higher speed motors. Motor placement is also an advantage shared with belt drive systems, as the motor is higher off the ground and therefore less prone to damage. You can also bring your own wheels, another non-trivial advantage shared by both belts and direct drives. Some gear drive systems may even allow you to change the gearing to adjust the reduction ratio, but most systems available at the time of this writing are fixed.
Drawbacks
The biggest drawback to almost any gear drive system, aside from not being able to change the gearing which is a big one, is the noise. Obviously this isn’t that big of a deal on paper, but on the street it can be a little divisive. You may personally find that the noise is intriguing, or even delightful. Some do; I kind of like it in a way. Others find that it sounds like your mom’s old Toyota driving down the street in reverse. Noisy boards can also draw unwanted attention and give off the impression that what you are doing is dangerous and somehow unacceptable. This is a very irritating psychological mechanic, but one you have to consider when making decisions regarding your builds. Gear drives obviously aren’t going to make the kind of attention grabbing noise that a broken box scraping the ground can make, or even the kind of noise a damaged magnet smacking your motor’s stator hundreds of times per second can make, but it can turn a head quickly.
Which drive is right for your build?
More than likely the determining factor won’t be what it is that you want, but what’s available. At the moment, belt drives are king in the DIY world not because of any sort of superiority, but because of parts availability. Hub drives are also easily acquired, but most commercial options available are not that great in quality, and due to everything we’ve already mentioned, the only real advantage there is a vast decrease in build time. The ones we would like to have aren’t quite available for immediate purchase yet and are still in a preorder phase (looking at you, Enertion, the only hubs that matter really). Gear drives are roughly in the same boat, which a few proprietary commercial builders looking into it or already using their own designs (for example: Jed Boards, ArcBoards). Direct drives are finally climbing out of the lack-of-availability hole, but are still deep in flux. Carvon practically invented the direct drive but is struggling to meet demand, which really isn’t much of a strike against them as I doubt anyone could even attempt to meet that demand without failing miserably. Meta Surf needs to improve their axle bending product, and TorqueBoards (diyelectricskateboard.com) has released their own version for preorder as well over the black friday weekend. All of this indicates that if you want to finish your build tonight and you like using real wheels, its probably going to be a belt drive system. The other options are to wait a few months and see who can ship immediately, or preorder now and hope your board gets built before the weather gets nice again.
- A Unique ESC: The Spintend Ubox - January 29, 2021
- Brian Boney Interview: Burning Wood For Fun And Profit - July 8, 2019
- Jeff Friesen Interview: Enertion, Unity, Remotes, and More - June 30, 2019